
Brayan Impata
Researcher & Engineer



I am Brayan Impata, PhD in Robotics and Machine Learning by the University of Alicante (Spain). As a PhD with a background in engineering, I am mainly interested in solving real-world problems with innovative solutions. During my PhD thesis, I worked on providing robots with manipulation skills which are natural for us humans, like finding ways to grasp objects on the fly using visual perception and checking the stability of a grasp with tactile perception. Delivering robots with such autonomous abilities would have a great impact on a wide set of scenarios: from re-stocking robots to space explorers as well as robots helping us at home.
During my free time, I love reading books, listening and playing music, and walking my dog.
GeoGrasp is one of the first results of my PhD. It is a method for computing grasping points on partial views of objects using 3D point clouds. It performs a fast geometrical analysis which generalises to a wide range of objects. Consequently, no learning phase is required and it can pe rapidly applied on various scenarios. Right now, it is being used as the base grasping system for the European project COMMANDIA. I currently maintain it as an open-source ROS package written in C++.
View Project Page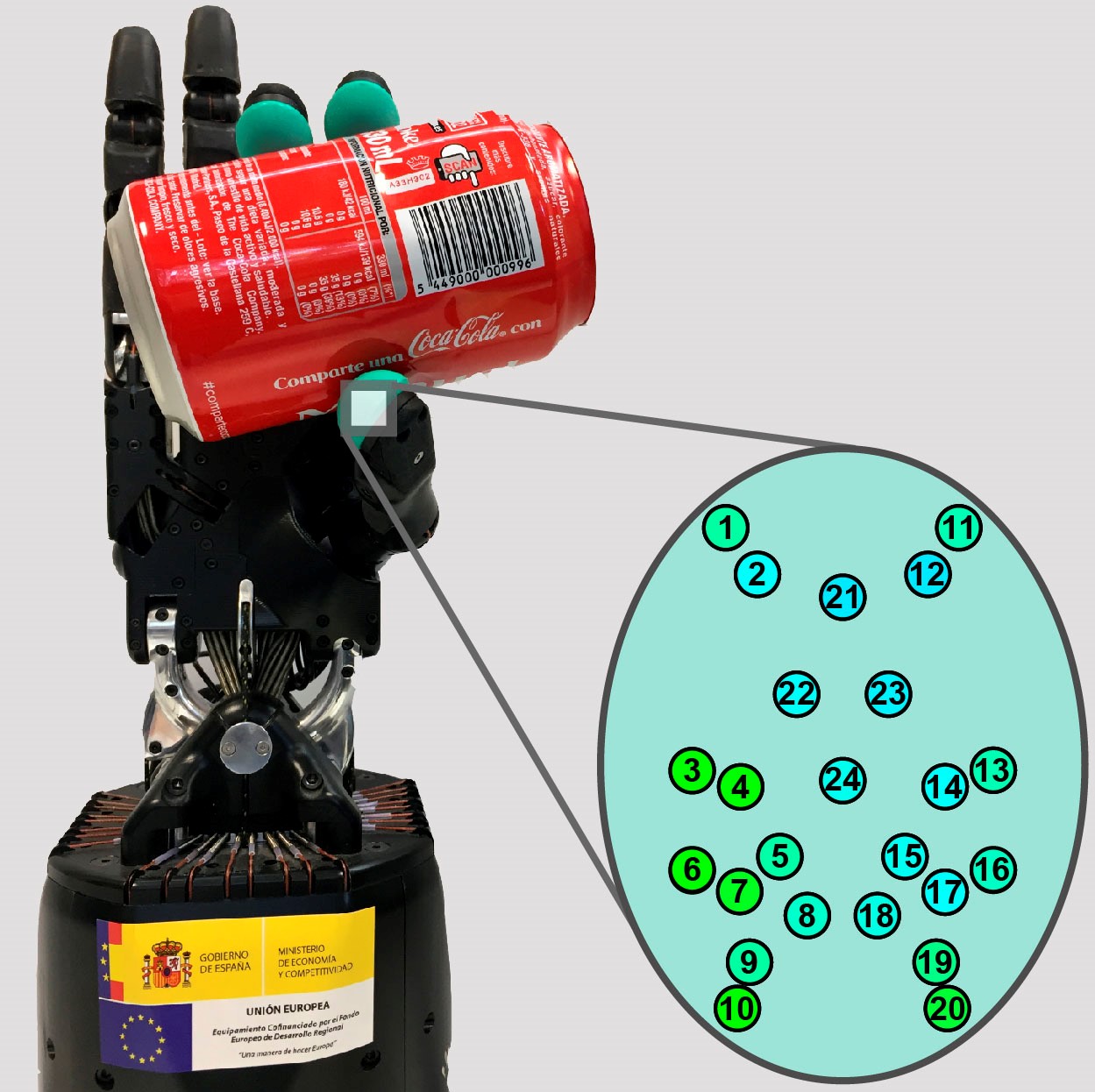
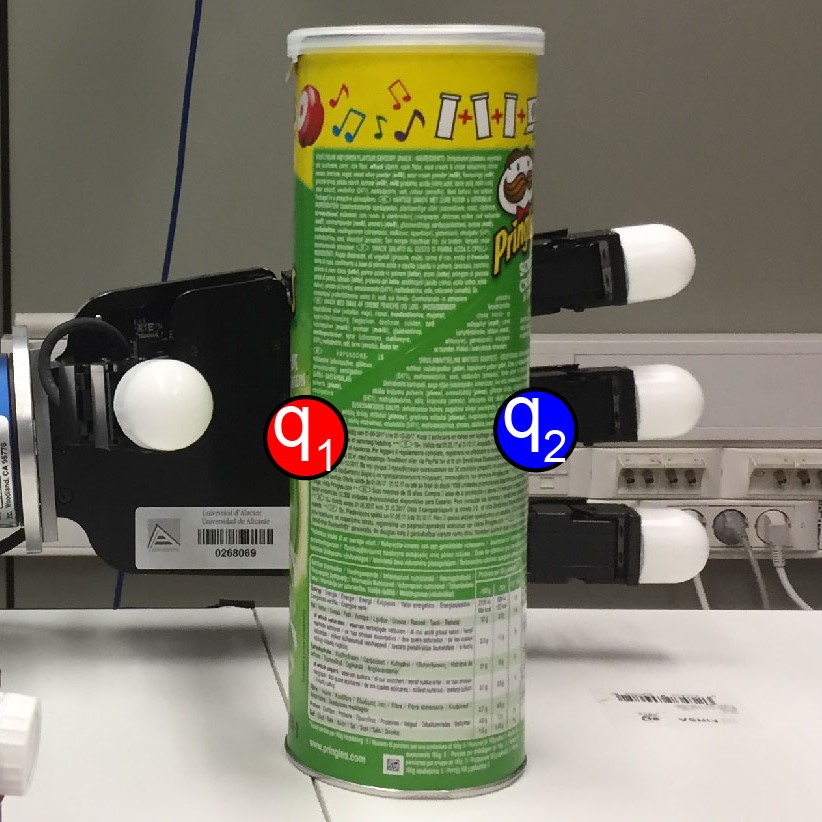
Computing visually promising grasps is not enough for developing an autonomous robot. In this project, I have worked on the task of predicting the outcome of a grasp before lifting using the BioTac SP tactile sensors and the Shadow Robot hand. To this end, I have explored two ways for representing the tactile responses: building tactile images or creating graphs that encode the actual spatial distribution of the sensing points.
View Project Page (Images)View Project Page (Graphs)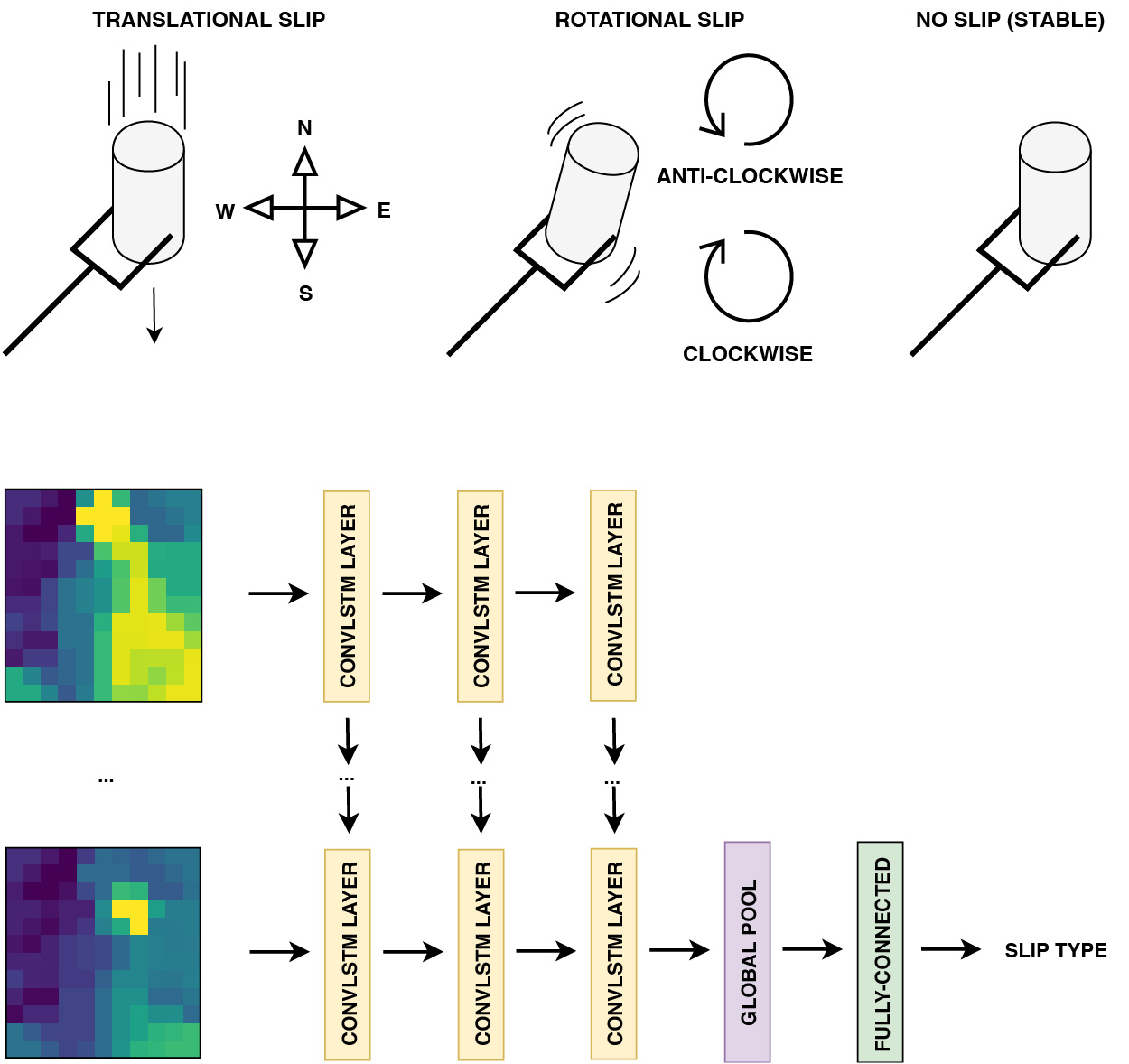
I have explored further the possibilities of tactile perception for grasp assessment. It is important for the autonomy of a robot to recognise whether a grasped object is slipping and also detect in which direction. This would help the system trigger appropriate re-grasping strategies for keeping a stable grip. This problem was approached using temporal sequences of tactile responses for learning to detect up to 7 different slippage patterns.
View Project PageIn many cities, trash bags often accumulate through the week, waiting to be picked up. Farm workers must often pick up and carry heavy tools daily. Construction workers spend a lot of time transporting materials through the construction site. These are all labor intensive tasks that could benefit from mobile robotic manipulation. For this project, I focused on the problem of picking and dropping novel objects in an open world environment. This work was carried during a research internship at the Helping Hands Lab head by Dr. Robert Platt.
View Project Page
Latest trends in robotic grasping combine vision and touch for improving the performance of systems at tasks like stability prediction. However, tactile data are only available during the grasp, limiting the set of scenarios in which multi-modal solutions can be applied. Could we obtain it prior to grasping? We humans can estimate the feeling of objects without even making contact with them! In this on-going project I work on novel ways for generating robotic tactile data from visual perception.
View Project Page
Humans are expert manipulators. Our dexterity is something we train since we are born: babies continuously use their hands to reach objects and learn to grasp them. Inspired in this fact, researchers are exploring the application of Reinforcement Learning (RL) for teaching robots how to grasp objects. In my path to learn about this field, I am implementing by myself RL techniques and testing them on common robotics benchmarks like a balancing robot. My goal is to develop my understanding of the field and apply these techniques for learning dexterous manipulation skills like re-grasping strategies based on tactile observations.
View Project Page